1. Clustered system and
2. Real-time system.
Clustered system
A computer cluster is a group of linked computers, working together closely so that in many respects they form a single computer. The components of a cluster are commonly, but not always, connected to each other through fast local area networks. Clusters are usually deployed to improve performance and/or availability over that provided by a single computer, while typically being much more cost-effective than single computers of comparable speed or availability.
Cluster categorizations
High-availability (HA) clusters
High-availability clusters (also known as failover clusters) are implemented primarily for the purpose of improving the availability of services which the cluster provides. They operate by having redundant nodes, which are then used to provide service when system components fail. The most common size for an HA cluster is two nodes, which is the minimum requirement to provide redundancy. HA cluster implementations attempt to manage the redundancy inherent in a cluster to eliminate single points of failure.
There are many commercial implementations of High-Availability clusters for many operating systems. The Linux-HA project is one commonly used free software HA package for the Linux OSs.
Load-balancing clusters
Load-balancing clusters operate by distributing a workload evenly over multiple back end nodes. Typically the cluster will be configured with multiple redundant load-balancing front ends.
Grid computing
Grid computing is optimized for workloads which consist of many independent jobs or packets of work, which do not have to share data between the jobs during the computation process. Grids serve to manage the allocation of jobs to computers which will perform the work independently of the rest of the grid cluster. Resources such as storage may be shared by all the nodes, but intermediate results of one job do not affect other jobs in progress on other nodes of the grid.
Real-time system
A real-time operating system (RTOS) is a multitasking operating system intended for real-time applications. Such applications include embedded systems (programmable thermostats, household appliance controllers, mobile telephones), industrial robots, spacecraft, industrial control and scientific research equipment.
An RTOS facilitates the creation of a real-time system, but does not guarantee the final result will be real-time; this requires correct development of the software. An RTOS does not necessarily have high throughput; rather, an RTOS provides facilities which, if used properly, guarantee deadlines can be met generally (soft real-time) or deterministically (hard real-time). An RTOS will typically use specialized scheduling algorithms in order to provide the real-time developer with the tools necessary to produce deterministic behavior in the final system. An RTOS is valued more for how quickly and/or predictably it can respond to a particular event than for the given amount of work it can perform over time. Key factors in an RTOS are therefore a minimal interrupt latency and a minimal thread switching latency..
Real-time and embedded systems operate in constrained environments in which computer memory and processing power are limited. They often need to provide their services within strict time deadlines to their users and to the surrounding world. It is these memory, speed and timing constraints that dictate the use of real-time operating systems in embedded software.
Basic kernel services
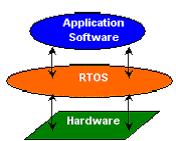
The "kernel" of a real-time operating system ("RTOS") provides an "abstraction layer" that hides from application software the hardware details of the processor (or set of processors) upon which the application software will run. This is shown in Figure.
In providing this "abstraction layer" the RTOS kernel supplies five main categories of basic services to application software, as seen in Figure.
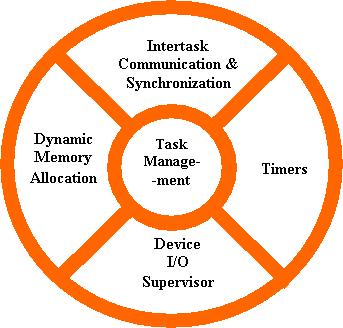
Task Management
The most basic category of kernel services is Task Management. This set of services allows application software developers to design their software as a number of separate "chunks" of software -- each handling a distinct topic, a distinct goal, and perhaps its own real-time deadline. Each separate "chunk" of software is called a "task." Services in this category include the ability to launch tasks and assign priorities to them.
Inter task Communication and Synchronization
The second category of kernel services is Inter task Communication and Synchronization. These services make it possible for tasks to pass information from one to another, without danger of that information ever being damaged. They also make it possible for tasks to coordinate, so that they can productively cooperate with one another.
Dynamic Memory Allocation
Many (but not all) RTOS kernels provide Dynamic Memory Allocation services. This category of services allows tasks to "borrow" chunks of RAM memory for temporary use in application software. Often these chunks of memory are then passed from task to task, as a means of quickly communicating large amounts of data between tasks.
Device I/O Supervisor
Many (but not all) RTOS kernels also provide a "Device I/O Supervisor" category of services. These services, if available, provide a uniform framework for organizing and accessing the many hardware device drivers that are typical of an embedded system.
Timers
Since many embedded systems have stringent timing requirements, most RTOS kernels also provide some basic Timer services, such as task delays and time-outs.